3. DC 모터의 가변속 제어법
페이지 정보
작성자 관리자 댓글 0건 조회 4,637회 작성일 18-10-28 11:21본문
3. DC 모터의 가변속 제어법
DC 모터의 가변속 제어법
(1) DC 모터의 가변속 제어
DC 모터의 속도를 연속적으로 바꾸려는 경우에는 어떻게 하는가?
기본적으로는 DC 모터에 가하는 전압을 바꾸면 속도는 변화한다.
단순히 모터의 코일에 흐르는 전류와 속도가 정비례하기 때문에 아랫 그림과 같이 하여 모터의 구동전압을 변화시키면 속도를 가변으로 할 수 있는 것이다.
이 구동전압을 변화시키는 방법으로 아날로그 방식과 펄스폭 변조방식의 두 가지 방법이 있다.
다음은 각 방식과 특징에 대해 설명한다.
(2) 아날로그 방식의 가변속 제어
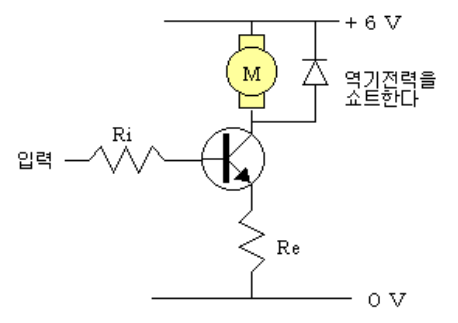
직접 구동전압 그 자체를 변화시키는 것으로, 기본회로는 아랫 그림과 같다.
즉, 트랜지스터로 전압 dropper를 구성하고, 컬렉터 이미터간의 드롭 전압을 바꿈으로써 모터에 가해지는 구동전압을 가변으로 한다.
이 기본원리에 의해, 드롭퍼 전압이 그대로 열로 되어 손실로 되며, 특히 저속으로 할 때, 전력 사용 효율이 나빠지고 만다.
이 손실로 인해 발생하는 열대책을 위해, 큰 방열판을 필요로 하기 때문에 전체가 대형으로 되고 만다.
그러나, 소형 모터이고, 게다가 속도의 가변폭이 작아도 좋은 경우에는 손실을 작게 할 수 있다는 점과, 제어회로가 간단하기 때문에 흔히 사용되고 있다.
(3) 펄스폭 변조(PWM) 방식
PWM 방식은 결과적으로는 구동전압을 바꾸고 있는 것과 같은 효과를 내고 있지만, 그 방법이 펄스폭에 따르고 있으므로 펄스폭 변조(PWM: Pulse Width Modulation)라 부르고 있다.
구체적으로는 모터 구동전원을 일정 주기로 On/Off 하는 펄스 형상으로 하고, 그 펄스의 duty비(On 시간과 Off 시간의 비)를 바꿈으로써 실현하고 있다. 이것은 DC 모터가 빠른 주파수의 변화에는 기계 반응을 하지 않는다는 것을 이용하고 있다.
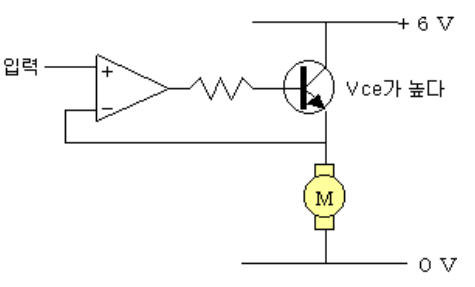
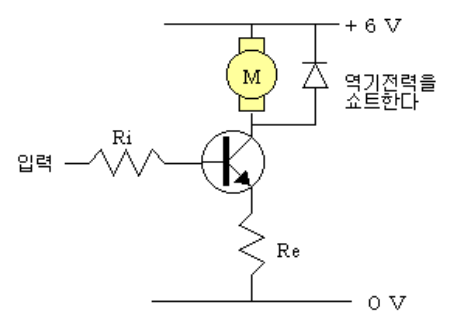
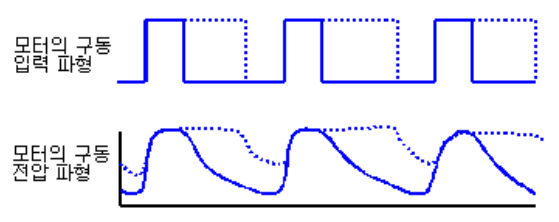
기본회로는 아랫 그림과 같으며, 그림에서 트랜지스터를 일정시간 간격으로 On/off하면 구동전원이 On/Off 되는 것이다.
이 펄스 형상의 전압으로 DC 모터를 구동했을 때의 실제 모터에 가해지는 전압 파형은 아랫 그림과 같이 되며, 평균전력, 전압을 생각하면 외관상, 구동전압이 변화하고 있는 것이다.
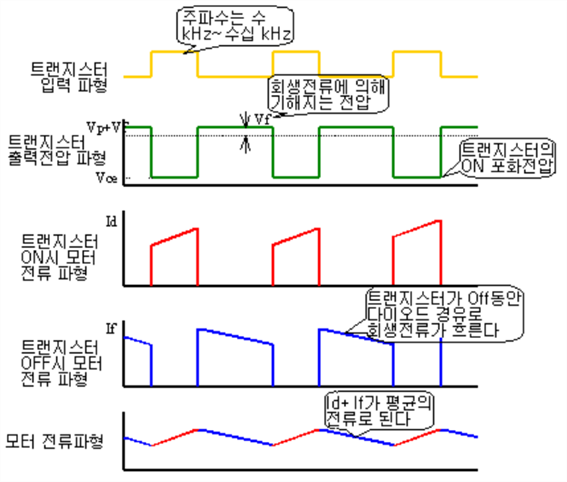
여기서 중요한 기능을 담당하고 있는 것이 위의 회로도에 있는 다이오드이며, 일반적인 전원용 다이오드를 사용하지만, 그 동작 기능에 의해 flywheel diode라 부르고 있다.
즉, 트랜지스터가 Off로 되어 있는 동안, 모터의 코일에 축적된 에너지를 전류로 흘리는 작용을 한다(회생전류라 부른다).
이 상태를 그림으로 나타내면 아랫 그림과 같이 되며, 이 플라이휠 효과에 의해, 모터에 흐르는 전류는 트랜지스터가 Off로 되어 있는 동안에도 쉬지 않고 흐르고 있는 것처럼 보이게 되며, 평균전류도 On시의 전류와 이 회생전류의 합으로 된다.
(4) IC에 의한 실제 회로
모터 제어용의 전용 IC 가운데는 가변속 제어의 기능을 탑재한 것이 있다. 아래에 대표적인 것을 사용한 실제 제어회로의 예를 소개한다.
아래 예는 스테핑 모터(stepping motor)용이지만, 단독으로 DC 모터의 가변속 제어용으로도 사용할 수 있다.
TA7289P PWM 방식 바이폴러형 스테핑 모터 드라이버의 특징
·동작 전원전압 범위 Vcc=6∼27V
·정회전, 역회전, 스톱의 3가지 모드 선택 제어 가능
·4비트 D/A 컨버터 내장, 가변속 제어 가능
·드라이브 능력 Io=1.5A Max
·PWM chopper 방식에 의한 정전류 구동방식
·외부부착 부품수가 적다
·입력은 LS-TTL compatible

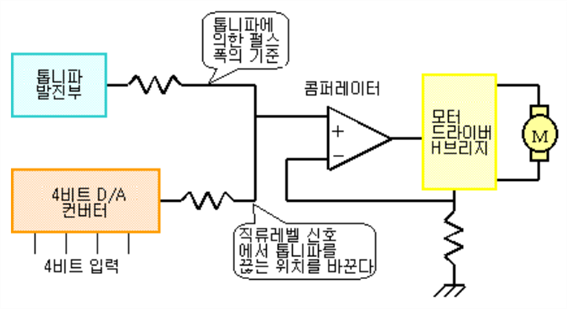
IC의 내부회로 블록은 아랫 그림과 같이 되어 있으며, 펄스폭의 기준이 되는 톱니파를 D/A 변환부 출력의 직류 레벨로 상하 동작시키고 있다.
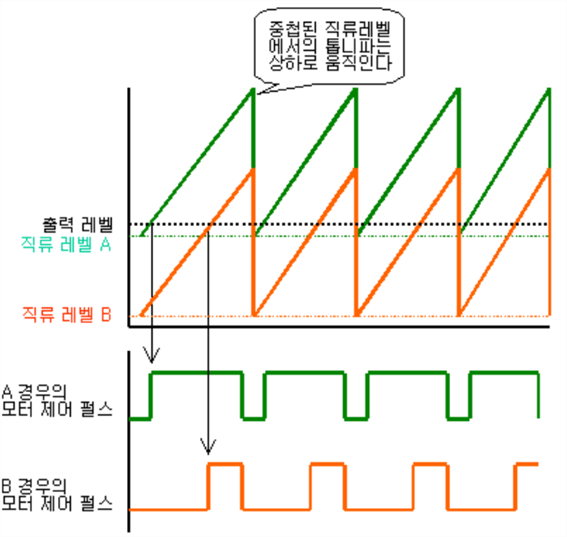
이 모양을 그림으로 나타내면 중첩되는 D/A 변환부의 직류 레벨에 의해 톱니파가 상하로 움직이고, 출력 레벨을 끊는 위치가 연동하여 움직인다. 이에 따라 출력의 On/Off 펄스폭이 가변되는 것이다.
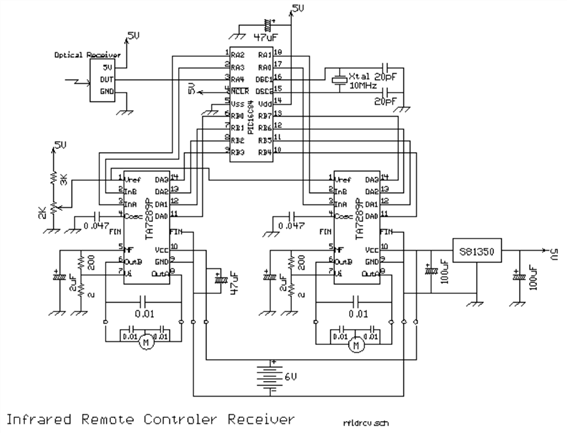
(5) 실제의 사용 사례
아랫 그림은 PWM 방식의 가변속 IC를 사용한 제작 예로, 주행 로봇에 탑재한 회로이다. PIC에서 직접 TA7289P를 컨트롤하고 있다.
4비트의 데이터를 PIC의 포트로 설정하여, 정/역회전의 제어신호에 의해 모터가 회전을 시작한다.